8.1. Облучатели и поляризаторы
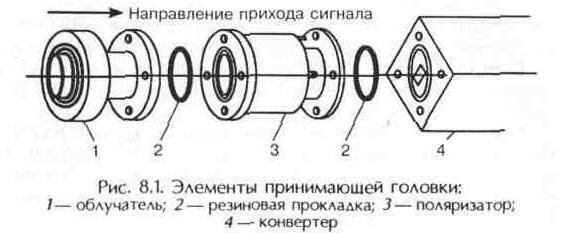
Принимающая головка, находящаяся в фокусе параболического зеркала антенны, состоит из трех частей: облучателя, поляризатора и конвертера (рис. 8.1).
Эти функционально различные блоки конструктивно можно объединить и выполнить в одном корпусе (попарно или все три элемента вместе).
Отраженный параболической антенной сигнал идет на облучатель. Его назначение — передать принятую антенной энергию телевизионного ретранслятора спутника по волноводу к конвертеру.
Облучатель — один из важнейших узлов антенной системы, поэтому к нему предъявляются определенные требования: диаграмма направленности должна быть осесимметричной и без боковых лепестков; облучатель не должен сильно затенять параболическую антенну, так как это приводит к искажению ее диаграммы направленности и снижению коэффициента использования поверхности параболоида вращения.

Облучателями параболических антенн служат слабонаправленные антенны. Это могут быть рупоры, щелевые антенны, спирали, диэлектрические антенны и др. Наиболее простыми являются облучатели в виде открытого конца волновода — прямоугольного или круглого сечения (рис. 8.2).
Волновод круглого сечения в большей степени удовлетворяет требованиям, предъявляемым к облучателям антенных систем,— диаграмма направленности осесимметрична, в отличие от пирамидального (прямоугольного) волновода.
Конструкции облучателей для осесимметричной и офсетной антенн несколько различаются. Это связано с тем, что параболическая антенна характеризуется отношением ее фокусного расстояния к диаметру параболоида вращения (F/D).
Большинство изготавливаемых сейчас осесимметричных спутниковых антенн имеют параметр F/D примерно 0,3...0,4, а офсетные — порядка 0,5...0,6. В соответствии с этим облучатели для осесимметричных и офсетных антенн изготавливают с разными «углами раскрытия».
В конструкции современных облучателей предусмотрены три металлических кольца для лучшей фокусировки электромагнитных волн и обеспечения более узкой диаграммы направленности антенны. Таким образом, облучатель является направленной антенной, которая установлена в фокусе параболического отражателя (рис. 8.3, 8.4).
Облучатель устанав ливается для более пол ного использования по верхности зеркала и реа лизации максимального коэффициента усиления антенны.
Электромагнитная вол на, распространяющаяся в пространстве от переда ющей антенны спутника до антенны наземной стан ции, характеризуется по ляризацией, т. е. ориента цией вектора напряжен ности электрического по ля Е относительно поверх ности Земли (см. гл. 1, п. 5).
Поляризатор является устройством, которое обе спечивает выбор необходимого вида поляризации принимаемой радиоволны. Обычно поляризатор устанавливается между облучателем и конвертером (рис. 8.5). При сборке важно обеспечить герметичность соединения. Так, например, резиновые прокладки должны точно располагаться в металлических пазах и не иметь перекосов.
По принципу своего действия поляризаторы могут быть механическими, ферритовыми (электромагнитными) и импульсными ферритовыми.
В состав механического поляризатора входит петлеподобный или штыревой проводник (3) (элемент связи с электрическим трактом конвертера) и исполнительный механизм (6) (рис. 8.6). Элемент связи (4) входит в электромагнитное поле волновода и преобразует его энер


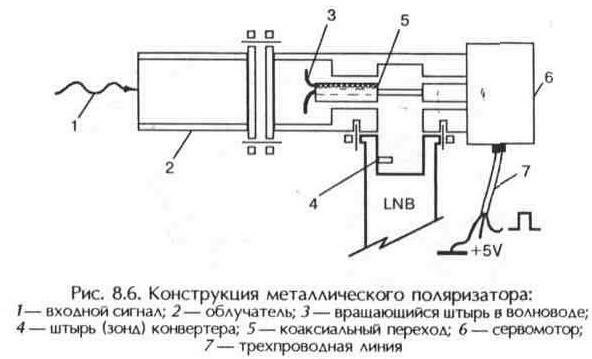
гию в электрический ток. Такую же роль выполняет любая телевизионная антенна, которую мы привыкли видеть на крышах зданий или мачтах.
Для того чтобы в элементе связи развивалась максимальная электродвижущая сила, которая в его проводнике создает наибольшее электрическое поле, необходимо придать зонду такое же положение, как и излучателю антенны на спутнике. Соответственно приемная система должна отделять сигналы одной поляризации от другой и принимать их отдельно.
В механических поляризаторах переход с одной поляризации на другую осуществляется повышением напряжения питания от 13 В (V поляризация) до 18 В (Н поляризация). Система с переключением позволяет получать два фиксированных значения поляризации, выбор которой происходит механическим перемещением — поворотом вокруг своей оси элемента связи с помощью шагового электродвигателя. Наличие подвижных элементов снижает надежность механического поляризатора.
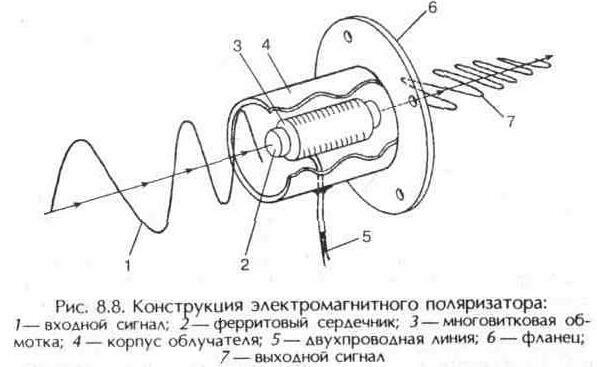
В электромагнитном поляризаторе (рис. 8.7) выбор поляризации (рис. 8.8) осуществляется изменением величины тока в катушке (3), намотанной на ферритовый сердечник (2). Надежность такого поляризатора выше, так как отсутствуют подвижные механические детали. К тому же, поляризаторы с токовым управлением позволяют выполнять плавную подстройку поляризации.
Поляризация сигнала, который передается со спутника, строго параллельна (Н) или перпендикулярна (V) поверхнос-

ти Земли только на долготе самого спутника. Если прием осуществляется более на Восток или на Запад, то из-за кривизны поверхности Земли плоскость поляризации больше наклонена относительно ее поверхности. Чем дальше долгота точки приема находится от долготы спутника, тем этот угол наклона больше. В соответствии с этим поляризатор
размешается под большим или меньшим углом к поверхности Земли.
Подобная проблема возникает в том случае, если антенну устанавливают с позиционированием на несколько спутников. Для каждого ИСЗ угол наклона свой, поэтому и необходима плавная токовая подстройка поляризации. Для каждого спутника выбирают свое значение управляющего тока и угол наклона плоскости поляризации к горизонту.
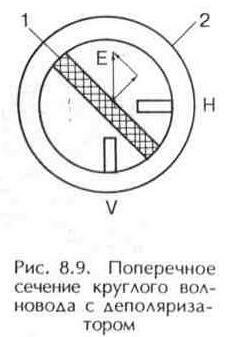
На европейских спутниках (ASTRA, EUTELSAT и др.) в основном используется линейная поляризация, а на российских (GALS1, GALS2, TDF2) — только круговая. Для приема круговых волн перед поляризатором устанавливают еще один элемент — деполяризатор, который преобразует круговую поляризацию в линейную (рис. 8.9).
Устройство, преобразующее один вид поляризации поля в волноводе круглого сечения (2) в другой, представляет собой отрезок волновода, в котором имеются продольные неоднородности в виде диэлектрических пластин (материал тефлон или др.) (1) и металлических стержней (Н или V). Очевидно, что фазовые скорости волн, у которых векторы f напряженности электрического поля параллельны или перпендикулярны пластинам или стержням, различны.
Пусть в волноводе круглого сечения с продольными неоднородностями распространяется линейно поляризованная волна, у которой вектор Е образует с плоскостью неоднородностей угол 45°. Разложим этот вектор на две составляющие: параллельную и перпендикулярную плоскости неоднородности. На входе деполяризатора обе составляющие поля одинаковые и имеют одинаковые фазы. Если длина, параметры и конфигурации пластин или стержней подобраны таким образом, что на выходе устройства разность фаз между параллельной и перпендикулярной составляющими вектора f равна 90° (3.14/2), то на выходе устройства вместо линейно поляризованного поля получим поле с круговой поляризацией. Это и есть поляризатор 3.14/2. Если в такой поляризатор поступает поле с круговой поляризацией, то оно преобразуется в поле с линейной поляризацией. В зависимости от положения диэлектрической пластины и штырей в волноводе осуществляется преобразование круговой поляризации в вертикальную или горизонтальную.
В ряде случаев при приеме сигналов с обоими видами
поляризации (линейная с европейских спутников и круговая с российских GALS и TDF2) можно обойтись и без деполяризатора. Однако при этом скажется проигрыш на 3 дБ в уровне кругового сигнала, что соответствует увеличению требуемого диаметра антенны в 1,4 раза. Для трансляций с GALS это не критично, так как на территории Республики Беларусь его сигнал принимается, например, в Минске на «тарелку» значительно меньшего диаметра (0,6...0,9 м), чем сигналы с любого европейского спутника.
Поляризаторы различаются еше и с точки зрения дискретности (прерывистости) изменения поляризации. В механических поляризаторах плоскость поляризации меняется дискретно на 90°. Поляризаторы с токовым управлением позволяют плавно изменять плоскость поляризации.
Существуют также импульсно-ферритовые поляризаторы, в которых поляризационный зонд передвигается с помощью механизма. Для управления этим механизмом к поляризатору посылается последовательность импульсов, длительность которых несет информацию о требуемом положении поляризатора. В таких поляризаторах плоскость поляризации меняется дискретно, но с небольшим шагом дискретизации.
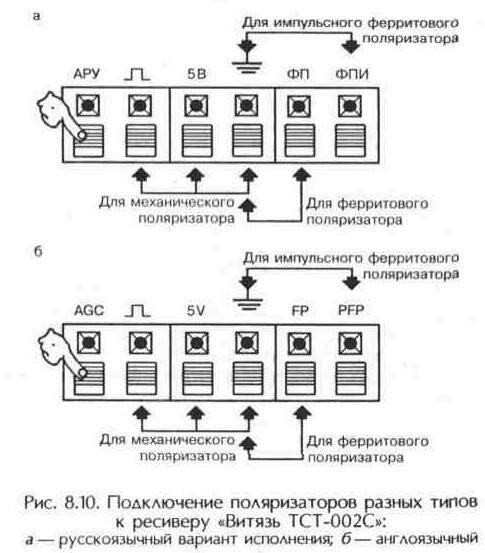
Электромеханические поляризаторы требуют трех управляющих сигналов от ресивера, в то время как магнитным необходимы только два (рис. 8.10).
Преимуществом электромеханических поляризаторов по сравнению с магнитными являются несколько меньшие потери сигнала. Сейчас электромагнитные поляризаторы используются в основном в С/Кu-роторах.